 Devices¶
Devices¶
This menu displays the possible payloads/devices that can be configured with Veronte Autopilot 1x. Each panel will allow the user to configure different parameters from the available variety of payloads.
Devices menu¶
By default, only the Transponder/ADS-B device is added to this menu (as shown in the figure above). However, users can added other devices supported by Veronte Autopilot 1x simply by clicking Add device:
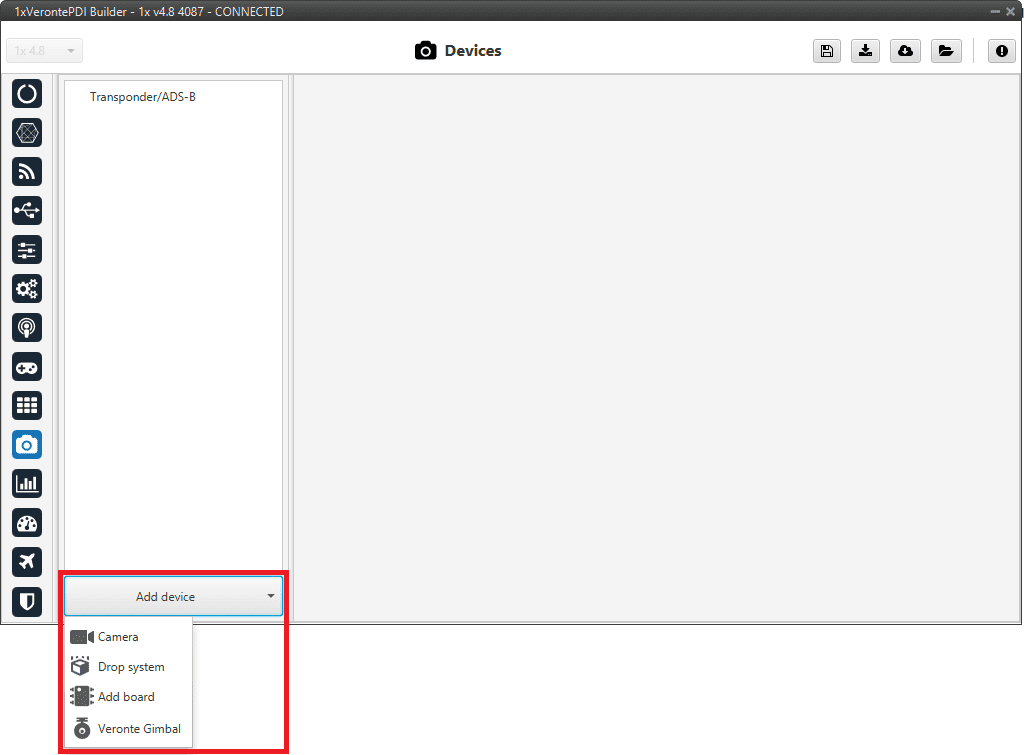
Devices menu - Add device¶
Transponder/ADS-B¶
A transponder is a device that generates or parses ADS-B messages. This menu allows the user to use/configure a transponder through Custom Messages.
The interface includes different transponder models, depending on the one selected, some configurable parameters are enabled or disabled.
Important
To configure the Squawk Code and enable/disable Ident Mode users must use the ADS-B widget of Veronte Ops. For more information on this, please refer to ADS-B - Flight instruments widgets of the Veronte Ops user manual.
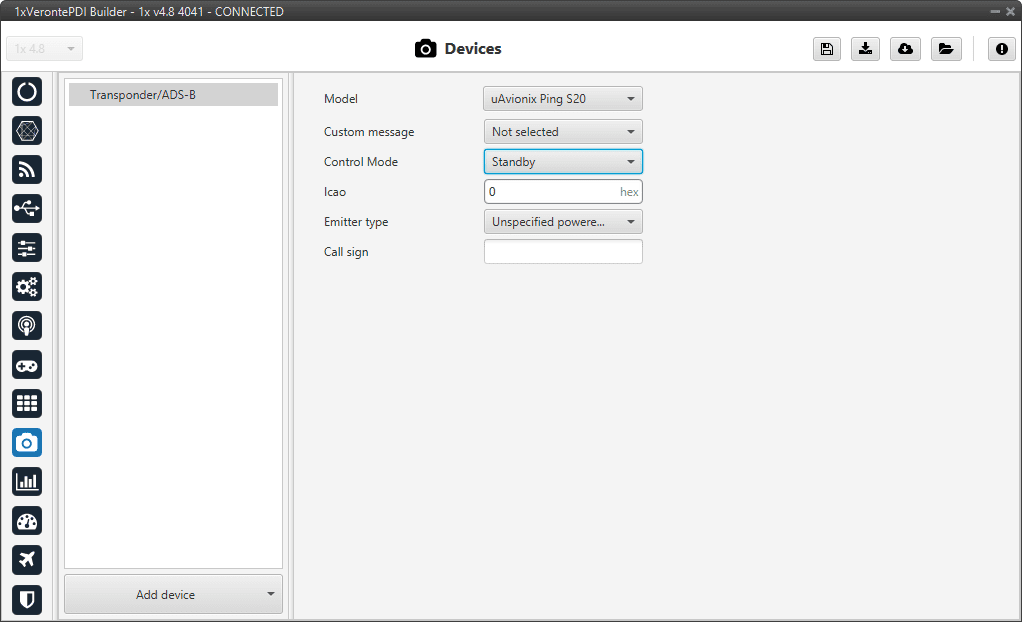
Transponder/ADS-B panel¶
The parameters that appear in this menu and that must be configured by the user depending on the transponder model are explained below:
Model: The options available in Veronte Autopilot 1x are as follows:
Internal Transponder
uAvionix Ping 20s
uAvionix Ping 1090
Sagetech MX Series
Sagetech XPS-TR
Sagetech XPG-TR
Sagetech XPS-TRB
Daedalean
Custom message: Select the Custom message 1-3 to be used for the information exchange, as it will be automatically filled with the information required by the transponder/ADS-B.
Note
This option is not available for the Internal Transponder model, as it is already integrated in the Autopilot 1x.
Control Mode: The user must configure the transponder type:
Standby: Silence mode.
ADS-B In: To detect external aircraft.
Note
This option is not admitted for the uAvionix Ping 20s model.
ADS-B Out: To communicate with external aircraft.
Note
This option is not admitted for the Deadelean model.
ADS-B In/Out: To detect and communicate with external aircraft.
Note
This option is not admitted for uAvionix Ping 20s and Daedalean models.
Icao: Unique ICAO 24-bit address permanent for the aircraft, which becomes a part of the aircraft’s Certificate of Registration.
It is represented by six hexadecimal characters.
Note
This option is not available for Sagetech and Daedalean models.
If the ADS-B In control mode has been selected, this option will be disabled.
Emitter type: The user should specify the type/category of the vehicle in which the transponder is located. The available options are:
Note
This option is not available for Sagetech and Daedalean models.
If the ADS-B In control mode has been selected, this option will be disabled.
Call sign: Communication call sign assigned as unique identifier to the aircraft.
Note
This option is not available for Sagetech and Daedalean models.
If the ADS-B In control mode has been selected, this option will be disabled.
Cameras¶
Adding a camera will create a default Camera configuration menu.
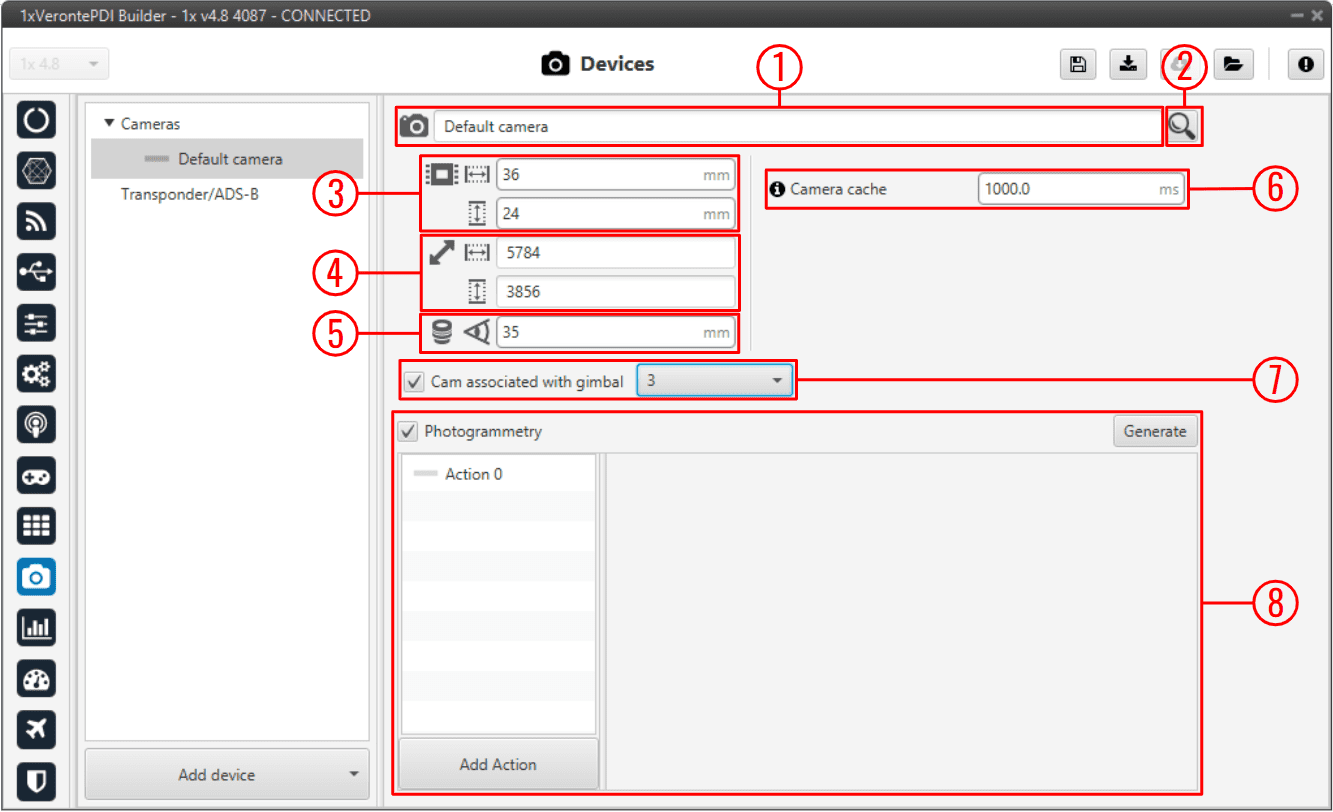
Cameras panel¶
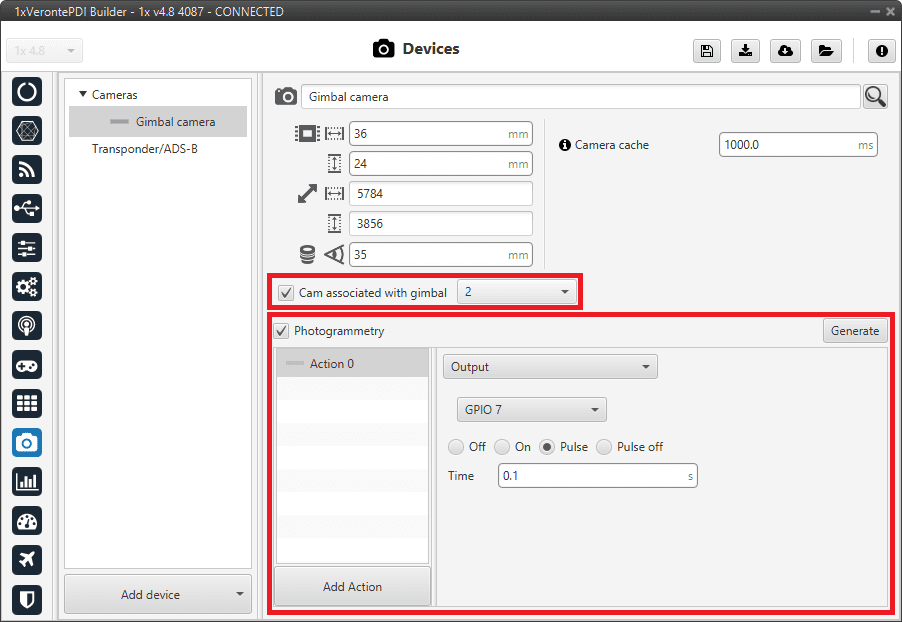
Name: Give a name to the customized camera.
Search: Users can also choose a camera from the predefined list of cameras, which will automatically establish the values of the Sensor, Resolution and Lens parameters.
Sensor: Defines the camera sensor width and height in mm.
Resolution: Defines the camera resolution width and height.
Lens: Defines the focal length from the camera in mm.
Camera cache: Defines the cache time used to play the selected camera on the gimbal widget.
A higher cache might increase the video delay.
A lower cache might cause video artifacts or disconnections.
Tip
333 miliseconds should be enough for a 1080p video.
Cam associated with gimbal: If the camera is from a Gimbal device, it is important to configure this field and select the Gimbal block number that is related to this camera.
Photogrammetry: This allows the creation of Photogrammetry actions.
The actions performed in a Photogrammetry mission can be defined here, following the same possibilities as in Actions - Automations menu.
Add Action: Will add a new action.
Warning
A maximum of 4 Actions can be defined (Actions 0-3).
Generate: Clicking on ‘Generate’ will create the automation ‘Photogrammetry’ with a Button as event and with the actions defined here.
An example is given below:
Cameras panel - Example¶
The automation created for Photogrammetry is shown below:
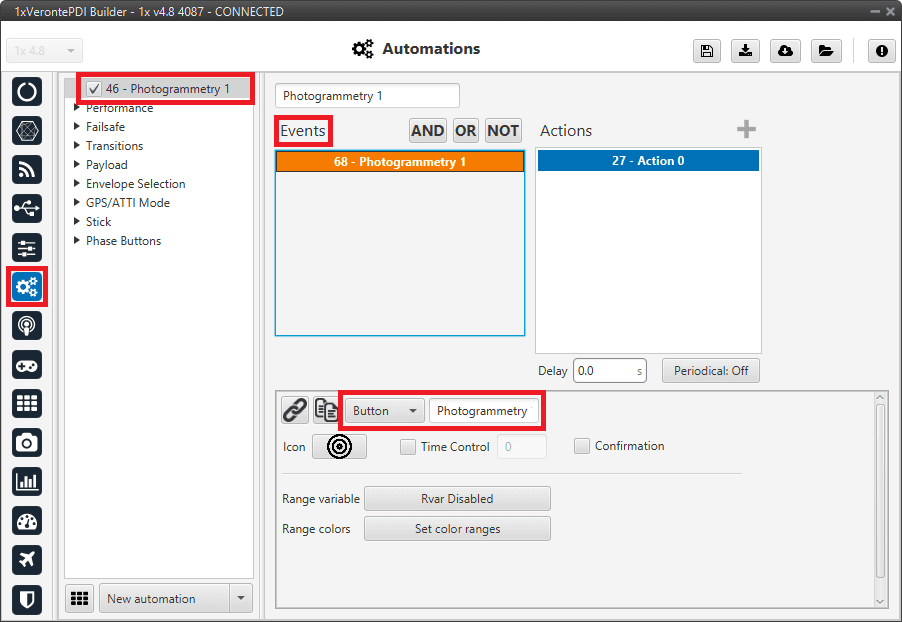
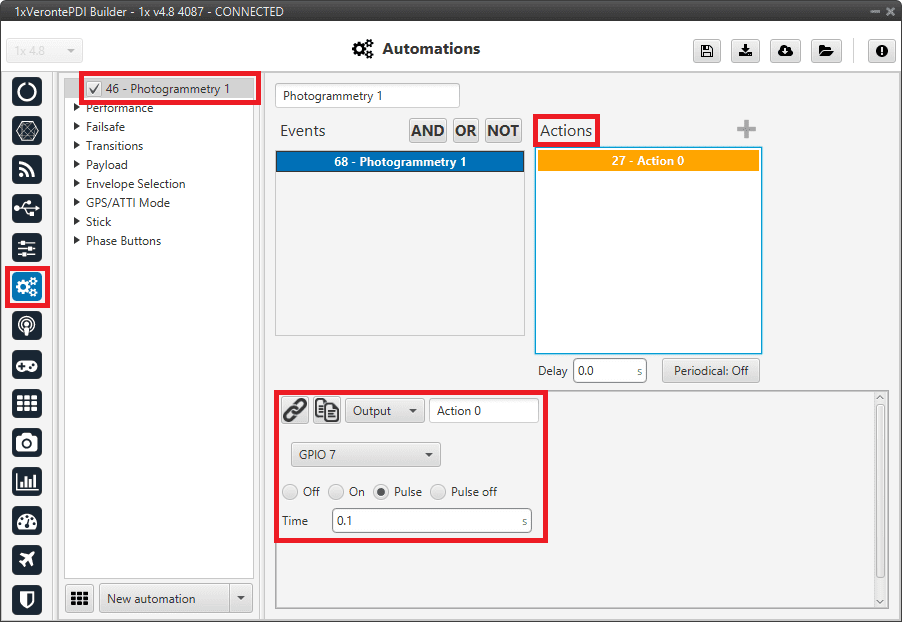
Cameras panel - Automation example¶
Board¶
This board menu allows the user to configure communicate via CAN, in 1x PDI Builder, with another device such as CEX, MEX, MC01, etc., in only 1 step, so in only 1 interface window. Instead of doing it in several steps, as is explained in CEX/MEX - Integration examples section or MC01 - Integration examples section.
Board panel¶
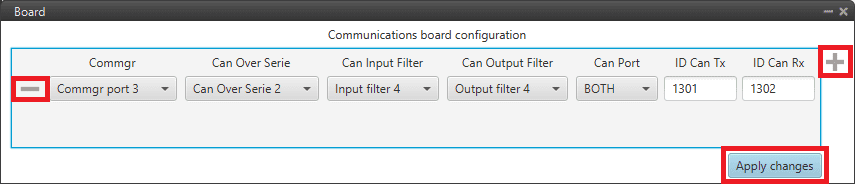
Click on the
 icon to add a new field. The following parameters must be defined:
icon to add a new field. The following parameters must be defined:Commgr port: Select the desired COM Manager port: Commgr port 1-6.
Can Over Serie: Select the desired Serial to CAN / CAN to serial: Serial to CAN 1-2/CAN to Serial 1-2.
Can Input Filter: Select the desired input filter to use: Input Filter 1-4.
Can Output Filter: Select the output filter the user wishes to use: Output Filter 1-4.
Can Port: CAN A, CAN B or BOTH can be selected.
ID Can Tx: Enter the ID of the CAN message to be sent.
ID Can Rx: Enter the ID of the CAN message to be received.
Warning
Be careful not to select a producer/consumer that is being used for another purpose, as the configuration defined here has “priority” and will be changed to this.
For more information on these parameters, see Input/Output section of this manual.
Clicking the
 icon will remove the field and display a confirmation warning message.
icon will remove the field and display a confirmation warning message.By clicking on ‘Apply changes’, all these CAN communication settings are applied to the Autopilot 1x configuration.
Below is an example of before/after when changes are applied:
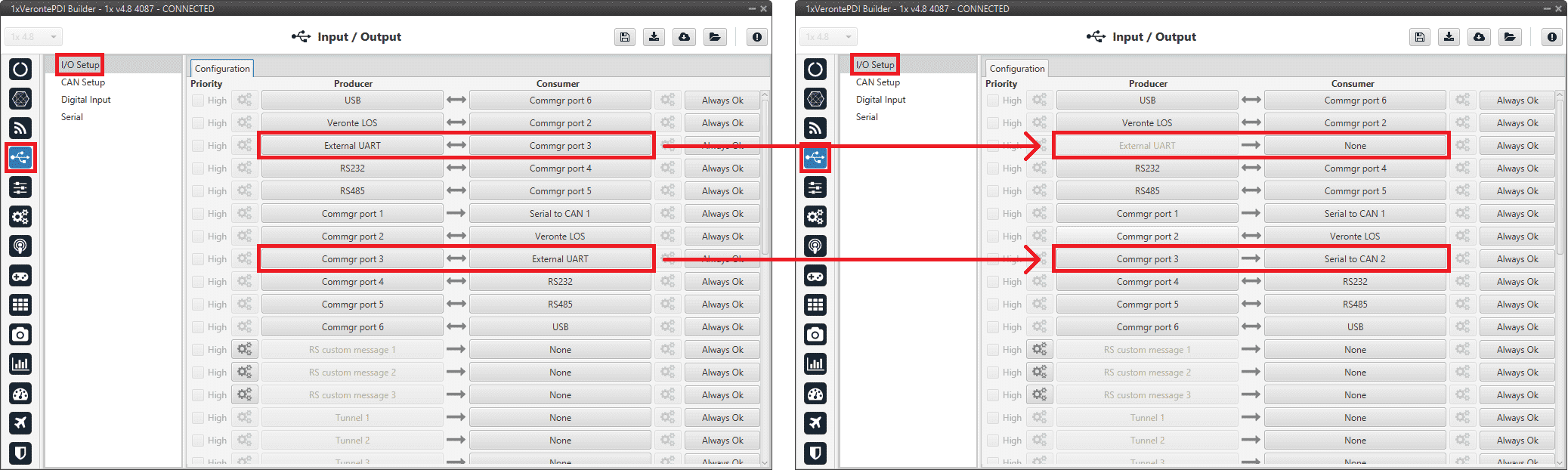
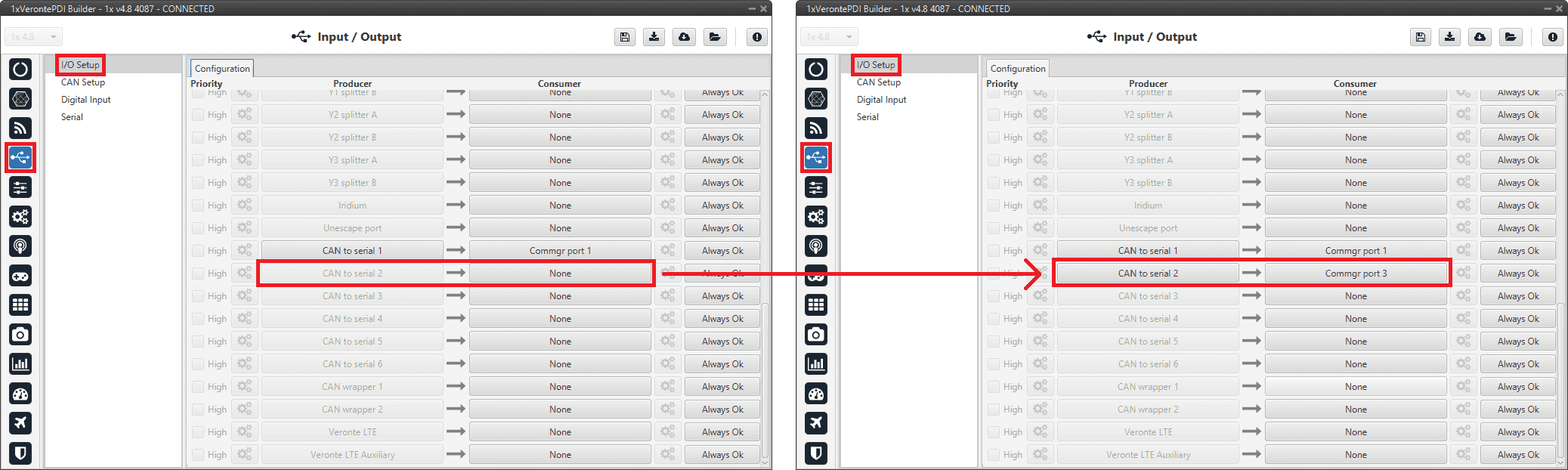
Board panel - I/O Setup configuration¶
![]()
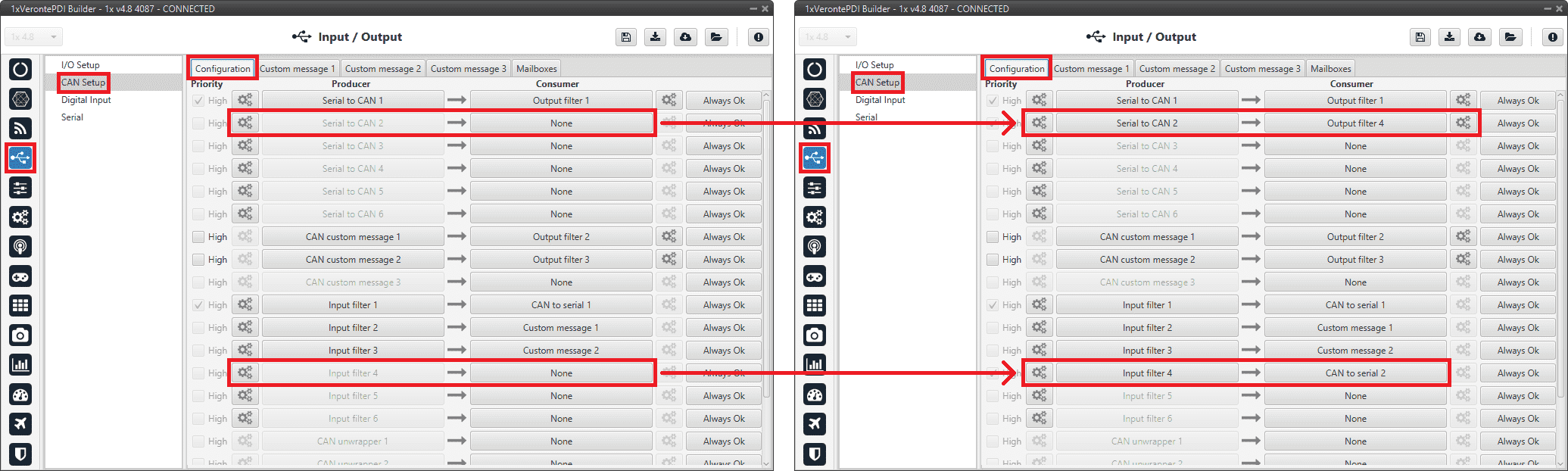
Board panel - CAN Setup configuration¶
![]()
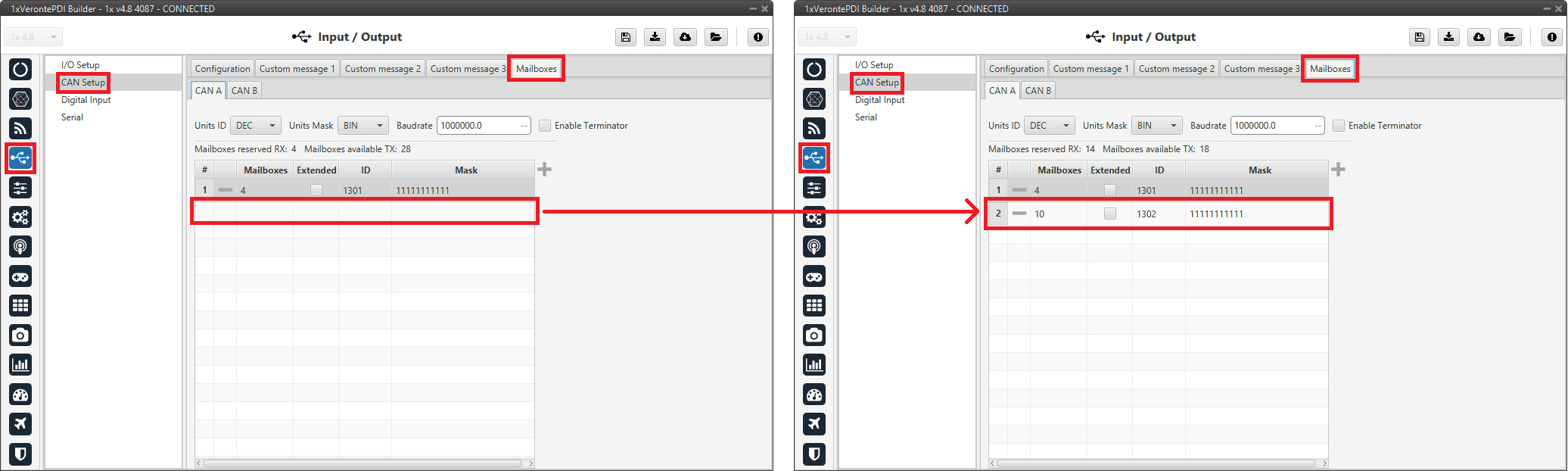
Board panel - Mailboxes configuration¶